深圳大学土木与交通工程学院中澳BIM与智慧建造联合研究中心吴环宇副教授课题组提出了一种基于自主移动平台和3D点云技术的路面平整度自动化检测方法,用于数据获取的激光雷达代替了高昂的检测激光雷达,极大降低了检测成本;并将数据收集、处理、分析和输出整合至一个工程流程,实现了路面检测的全流程自动化。本研究为路面平整度自动化检测提供了有效的参考,有助于提高路面质量管理的水平。
原文标题:
Automated pavement roughness measurement using autonomous mobile platform and 3D point cloud analysis
原文链接:
https://doi.org/10.1016/j.measurement.2026.121009
作者信息:
Huanyu Wu, Minyan Zhong, Yongqi Liu, Ke Chen, Huaizhi Wang
封面照片:
Highlights:
1、提出了一种用于路面平整度自动化检测的框架,其配备LiDAR和IMU的移动机器人可实现实时平整度的测量。
2、提出了一种标准化处理数据的流程,即集数据获取、处理、计算与分析于一体,并提高了算法与设备间的兼容性,极大地提高了检测的效率。
3、使用传统的导航激光雷达用于点云扫描数据获取,取代了昂贵的检测激光雷达,既扩展了激光雷达的功能,也减少了硬件成本。
4、以四段路面状况不同的道路为实验区域,通过实地实验证实了路面平整度自动化检测框架的准确性和高效性。
摘要
路面平整度自动化检测对道路养护至关重要。然而,现有的反应类和断面类方法受限于使用效率较低和测量范围有限,而基于激光雷达的检测方法则存在成本高昂、操作复杂的问题。本研究提出了一种创新的集成化路面平整度自动检测框架。该框架结合自动导航与3D点云分析,构建了涵盖点云分割、自动化扫描及平整度测量环节的一体化工作流程算法。通过扩展导航雷达的应用用于点云采集,该框架在保持路面检测高精度的同时,显著降低了对昂贵高精度三维激光雷达系统的依赖。实验结果表明,该框架能提供可靠的平整度检测。通过使导航雷达同时承担导航与测量双重功能,并结合3D点云数据的自动处理,本研究推动了机器人技术与数字技术在基础设施管理领域的广泛应用。
问题背景介绍
道路是交通基础设施的基本组成部分,许多国家正大力发展建设道路。但随着道路的建设,大量的修建和运维也对公路的质量管理提出了更高的要求。在常用的道路质量指标中,路面平整度指的是路面偏离理想路面的程度,占整体路面服务性能的95%,直接影响驾驶舒适度、车辆运营成本和维护费用。
路面平整度检测方法按照检测原理可分为反应类检测方法和断面类检测方法。反应类检测方法通过车辆在穿越路面时的动态竖向响应间接获得平整度指标。然而,该方法极易受到车辆、传感器噪声和外部干扰的影响,从而导致测量不一致或不可靠。断面类检测方法则直接收集路面剖面数据,但受车速和振动的限制。并且其检测范围有限,只能检测路面的一条或者两条纵断面,检测平整度采样点少,不能全面客观的评价道路的平整度。此外,随着激光雷达技术的发展,三维激光扫描在路面平整度检测中得到了广泛的应用。然而,现有基于激光雷达的方法缺乏标准化的数据采集、处理和分析工作流程,导致操作过程复杂。并且采集的点云存在数据稀疏、密度不均以及缺乏内在相关性等不足。高精度3D激光雷达扫描仪价格高昂,进一步阻碍了其在日常检查中的广泛应用。
因此本研究基于自动导航技术和激光点云技术提出了一个集数据获取、处理、计算和分析于一体的路面平整度自动化检测框架。其中导航雷达用于捕捉三维路面点云,取代了昂贵的检测激光雷达,降低了硬件成本。该框架还集成了点云分割、点云自动扫描和平整度测量,提高了检测效率。
研究方法概述
该综合框架结合了自动导航和激光点云技术,实现了路面平整度的自动检测,提高了检测的效率和稳定性。它包括了三个部分,即移动机器人平台的开发、分析算法的设计以及全面的性能评估。
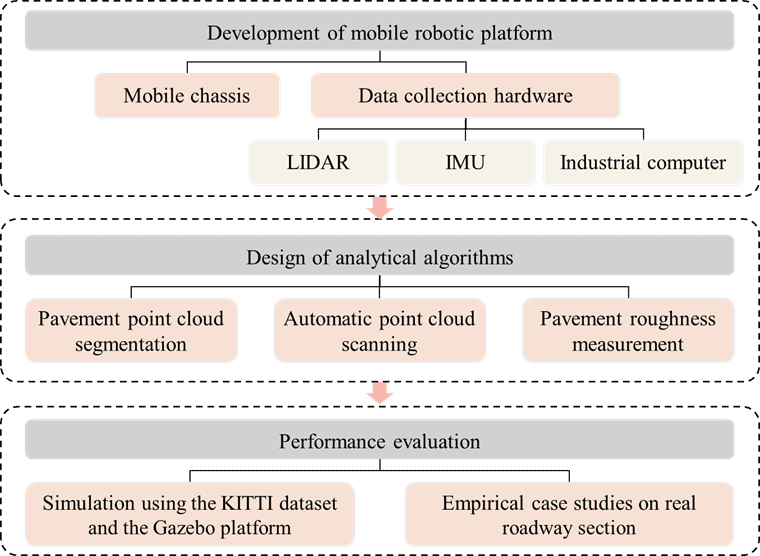
图1 研究方法概述
(1)阿克曼转向底座具有较强的抗震性和续航能力,常用于混凝土和沥青路面的长时间运行。并且它可搭载多种传感设备用于感知复杂的环境,同时配备工控机提供足够的算力,保证算法和软件的运行。
(2)RS-LiDAR-16 激光雷达提供360°旋转扫描,获取精确的三维点云数据,感知移动机器人的环境信息,从而帮助机器人构建环境地图、定位、导航并执行检测任务。这款导航级激光雷达价格不到3000美元,取代了传统的路面平整度仪表(如粗糙计、凸起积分仪),极大降低了硬件开支。
(3)HWT605-232 IMU 通过测量移动平台的角速度和线性加速度,实现平台位置、速度和方向的准确估计。
(4)VivoMini VC66工控机采用了多用途模块化设计,能够根据各种不同的使用场景进行灵活选配。并且配置了多个USB接口,满足多接口通信功能,具有强大的储存能力和计算性能。
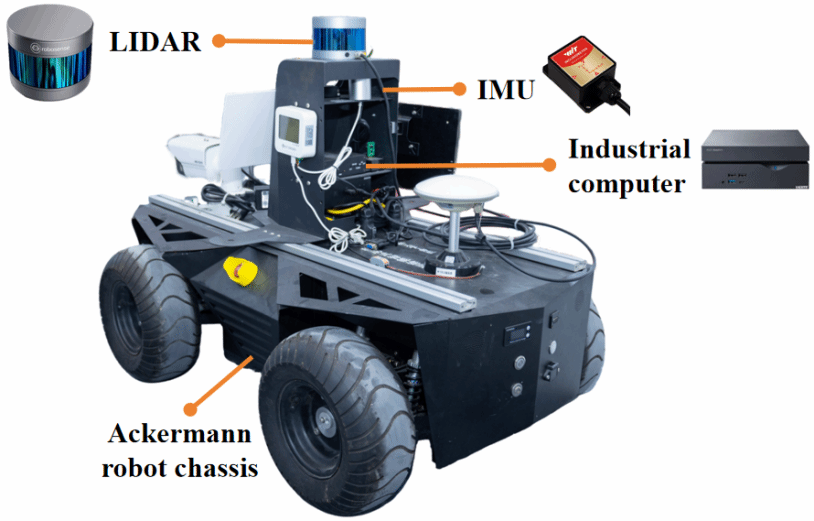
图2 移动机器人平台
基于Ubuntu 18.04 LTS和ROS (Robot Operating System) Noetic开发的路面平整度自动化检测算法实现主要分为三个部分:基于LineFit算法的点云分割、基于自动导航的点云扫描以及路面平整度指标的提取,算法的整体框架如图3所示。
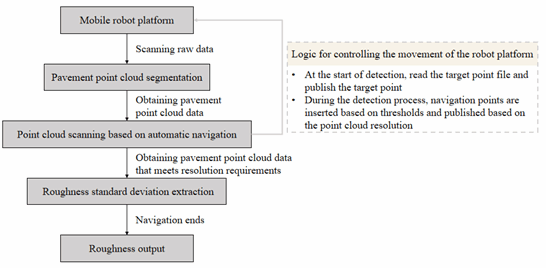
图3 整体算法工作流程
(1)基于LineFit算法的点云分割
准确地将地面与非地面元素分割,是确保自动导航和路面平整度测量可靠性的关键步骤。本研究采用的LineFit算法对地面点进行线拟合来识别和提取地面点,从而实现地面点云的分割,具有较好的分割效果和较强的鲁棒性,适用于具有复杂地形特征的大规模远程户外环境。
(2)基于自动导航的点云扫描
为了实现移动机器人平台的自主导航和点云自动采集,我们开发并优化了一套算法,包括SC-LeGO-LOAM、HDL Localization、move_base路径规划和自动扫描算法。
①SC-LeGO-LOAM算法
SC-LeGO-LOAM 算法能够构建点云地图,并将其转换为二维栅格地图,用于机器人平台自动导航,提供定位和路径规划所需的空间参考。该算法具有轻量级架构和高计算效率,同时引入了基于Scan context的回环检测,进一步增强大规模环境中的鲁棒性。
②HDL Localization算法
HDL Localization算法是一种基于激光雷达的实时定位方法,专为复杂的户外环境设计。它集成了传感器融合和IMU数据,准确估算机器人当前姿势,从而为自主导航和路径规划提供支持。该算法采用两阶段方法,前端基于无迹卡尔曼滤波(Unscented Kalman Filter,UKF)框架依据IMU数据对位姿进行最优估计,后端再通过正态分布变换算法(Normal Distributions Transform,NDT)对估计位姿进行矫正,从而对自身进行精确三维定位。
③move_base路径规划算法
move_base包是ROS的基本组件,用于确定机器人从出发点到目标点的运动路线,并在运动过程中依据动态障碍物实时调整运动路线。它集成了全局路径规划和局部路径规划,以确保在动态环境中的高效导航。全局路径规划通过评估起点与目标位置之间的空间关系,确定静态全局地图上的最优路线,采用了基于经典Dijkstra算法的Navfn规划器。而局部路径规划基于传感器实时输入环境数据,实现动态障碍物规避和持续轨迹优化,采用基于TEB算法的 teb_local_planner。
④自动扫描算法
本研究开发了基于路面点云分辨率的自动扫描算法,实现点云扫描的自动化,确保获取的点云数据满足预设的分辨率要求,同时减少人力和时间成本,提高操作效率。其核心思路是在已建立的地图上确定检测起点和终点的坐标,并通过设置检测距离阈值将整个检测区域划分为若干个检测段。移动机器人平台按索引顺序遍历每个区段,持续记录行驶距离并存储相应的点云数据。同时进行点云拼接和点云分辨率计算。若某段计算的分辨率达到平整度测量所需的阈值,则该段标记为有效,并与其空间坐标一同存储。如果分辨率不足,平台会自动返回该段的起点,改变运动状态(如速度、姿态),重复扫描过程。持续循环直到所有的检测段的路面点云满足要求,并成功导航至设置的终点,实现路面点云的自动扫描。
(3)路面平整度指标的提取
基于路面点云的平整度检测算法首先采用八叉树(Octree)根据所需分辨率将点云分割为若干三维网格,随后遍历每个网格,获取并储存其中包含点云的索引,方便网格内的平面拟合和标准差计算。当单个网格内的点云数量大于设置的阈值时,则利用RANSAC算法拟合平面。该算法通过初始参数计算各网格内的最佳拟合平面系数,构建新的拟合平面,并计算每个点云到平面的正交距离用于测量网格的标准差,最终汇总所有网格的标准差并取均值量化路面的平整度。通过利用三维点云数据的空间丰富性,该算法实现了高精度、全方位的平整度检测,捕捉了路面高低的细微变化。
总结与思考
荐读论文构建了路面平整度自动化检测框架,并通过模拟实验和实证实验证实了该框架的可行性和准确性。
主要发现:
(1)点云分割效果
为了验证LineFit算法的有效性,研究使用KITTI数据集,将处理后的点云标记为不同标签,并通过可视化窗口观察到效果。LineFit分割算法能够准确区分地面和非地面点,能够起到可靠的分割效果。
(2)建图和定位效果
在构建点云地图后,使用Evo对其轨迹准确度进行了定量评估,Evo是一个支持多种轨迹格式的Python包,能够绘制轨迹、评估轨迹与真值之间的误差。SC-LeGO-LOAM的估计路径与参考轨迹之间高度重叠,展示了该算法的精确性。HDL Localization算法也展示了良好的局部精度和全局轨迹一致性。
(3)路径规划与自动扫描效果
结果表明路径规划算法确保了轨迹的平滑性和高运行效率。自动扫描算法能够准确估算行驶距离,处理点云数据,并动态调整机器人行为。
(4)实验案例研究结果
本研究通过真实道路的实验案例,旨在评估所提框架在实际路况下的有效性。总体而言,路面平整度测量结果与实地观测数据高度吻合。四个路段实际路面状况的显著差异,以及测量平整度数据的明显不同,从一定程度上验证了路面平整度检测框架的可靠性。
荐读论文将自主导航和先进的激光点云技术结合,提出了一个路面平整度自动检测框架,实现了数据采集、处理、分析和输出的集成,促进了检测工作的高效进行。同时使用导航激光雷达作为传统高成本激光剖面设备的替代方案,完成高精度且经济的路面平整度测量,有利于该设备在实际应用中的广泛推广。研究结果进一步证实了该框架的可靠性和准确性。


